8 کاربرد جالب یادگیری عمیق در بینایی رایانه ای
 •
•



رشته بینایی رایانه ای در حال تغییر از روش های آماری به سمت شبکه عصبی یادگیری عمیق است. هنوز هم مشکلات چالش برانگیزی در دید رایانه ای وجود دارد. با این وجود، روش های یادگیری عمیق در حال دستیابی به نتایج مدرن برای حل برخی از مشکلات خاص هستند. تنها عملکرد مدل های یادگیری عمیق در مورد مشکلات نیست که جالب است؛ بلکه این واقعیت که یک مدل واحد می تواند معنی تصاویر را بیاموزد، وظایف بینایی را انجام دهد و نیاز به روش های تخصصی و دستی را برطرف کند نیز جذابیت بسزایی را ایجاد می کند.
در این مقاله 8 کاربرد جالب یادگیری عمیق در بینایی رایانه ای را بررسی می کنیم. ما سعی کردیم به مشکلات کاربر نهایی تمرکز کنیم.
1. طبقه بندی تصویر (Image Classification)
طبقه بندی تصویر شامل قرار دادن یک برچسب به کل تصویر یا عکس است. چند مثال از طبقه بندی تصویر شامل موارد زیر است:
• برچسب زدن تصاویر اشعه ایکس که آیا سرطانی هستند یا خیر
• طبقه بندی اعداد دست نویس
• اختصاص دادن نام به یک عکس یا یک چهره
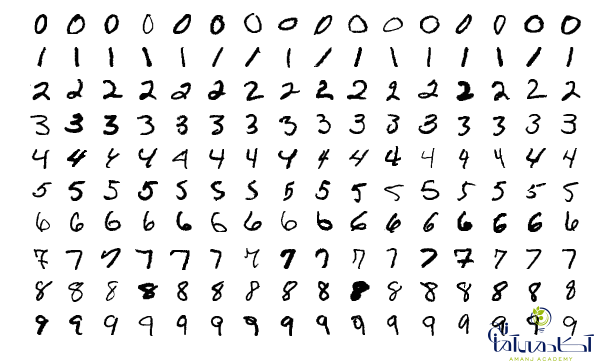 شکل الف: نمونه ای از ارقام دست نویس از مجموعه داده MNIST
شکل الف: نمونه ای از ارقام دست نویس از مجموعه داده MNIST
یک نمونه محبوب از طبقه بندی تصویر که به عنوان یک معیار مورد استفاده قرار می گیرد مجموعه داده MNIST است. نمونه هایی از طبقه بندی تصویر وجود دارد که شامل عکس اشیاء است. دو نمونه محبوب شامل مجموعه داده های CIFAR-10 و CIFAR-100 است که دارای عکس هایی هستند که به ترتیب در 10 و 100 کلاس طبقه بندی می شوند.
چالش تشخیص تصویری، یک رقابت سالانه است که در آن تیم ها برای بهترین عملکرد در طیف وسیعی از وظایف بینایی رایانه ای بر روی داده های تهیه شده از پایگاه داده ImageNet با یکدیگر رقابت می کنند. بسیاری از پیشرفت های مهم در طبقه بندی تصویر از مقالات منتشر شده حاصل می شود.
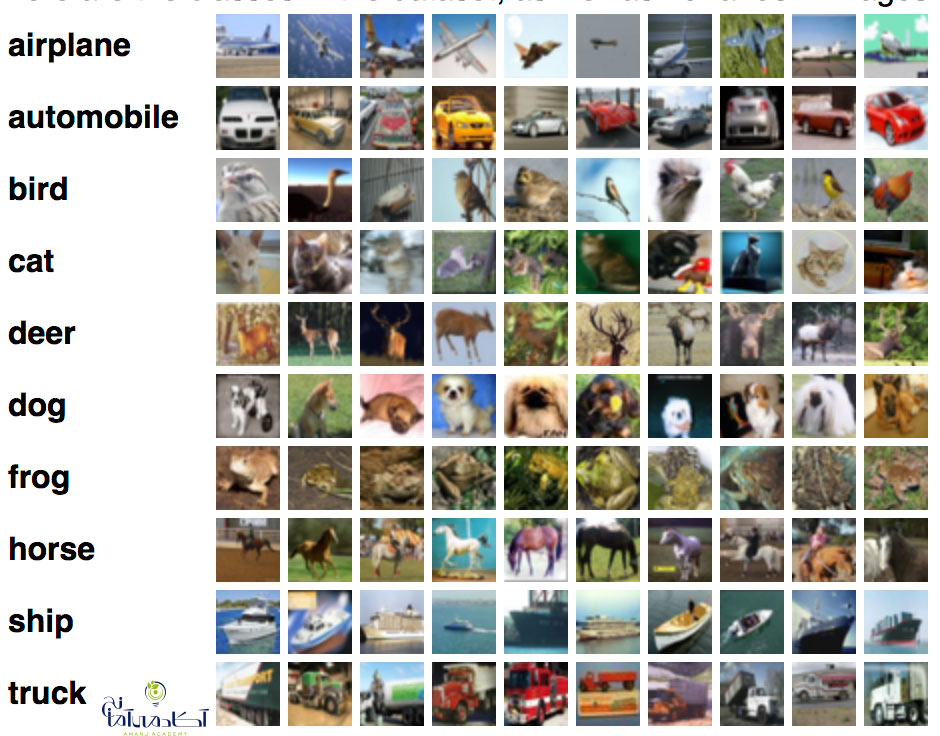
شکل ب:نمونه ای از عکس های اشیاء از مجموعه داده CIFAR-10
2. طبقه بندی تصویر با بخش بندی (Image Classification With Localization)
طبقه بندی تصویر با بخش بندی شامل اختصاص یک برچسب به یک تصویر و نشان دادن محل شی در تصویر توسط یک باکس (کشیدن یک جعبه در اطراف جسم) است. این یک نسخه چالش برانگیز تر از طبقه بندی تصویر است. چند مثال از طبقه بندی تصویر با بخش بندی:
• برچسب زدن تصاویر اشعه ایکس که آیا سرطانی هستند یا خیر و کشیدن باکس در اطراف ناحیه سرطانی
• طبقه بندی عکس حیوانات و کشیدن یک باکس در اطراف حیوان مورد نظر در هر عکس
یک مجموعه داده کلاسیک برای طبقه بندی تصویر با بخش بندی، مجموعه داده های کلاس های بصری PASCAL است.

شکل ت: نمونه ای از طبقه بندی تصویر با بخش بندی یک سگ از VOC 2012
این کار ممکن است شامل اضافه کردن باکس در اطراف نمونه های متعدد از همان شی در یک تصویر باشد. این عمل را به عنوان ” تشخیص شی” می شناسیم. مجموعه داده ILSVRC2016 برای طبقه بندی تصویر با بخش بندی، یک مجموعه داده محبوب است که از 150000 عکس و 1000 دسته اشیا تشکیل شده است.
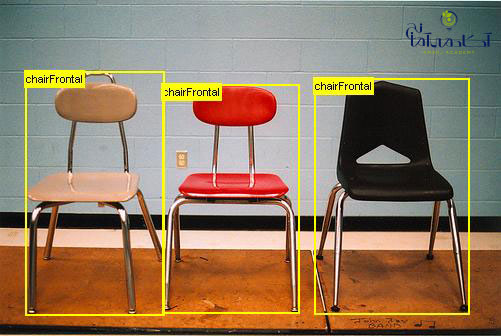
شکل ث: نمونه ای از طبقه بندی تصویر با بخش بندی صندلی های چندگانه از VOC 2012
3. تشخیص شی (Object Detection)
تشخیص شی طبقه بندی تصویر با بخش بندی است، اگرچه یک تصویر ممکن است شامل چندین شی باشد که نیاز به بخش بندی و طبقه بندی دارند. این یک کار چالش برانگیزتر از طبقه بندی تصویر ساده یا طبقه بندی تصویر با بخش بندی است، زیرا غالبا چندین تصویر در انواع مختلف وجود دارد. غالبا از تکنیک هایی که برای طبقه بندی تصویر با بخش بندی وجود دارد برای شناسایی شی استفاده می شود. مجموعه داده های بصری PASCAL یک مجموعه داده رایج برای تشخیص شی است.
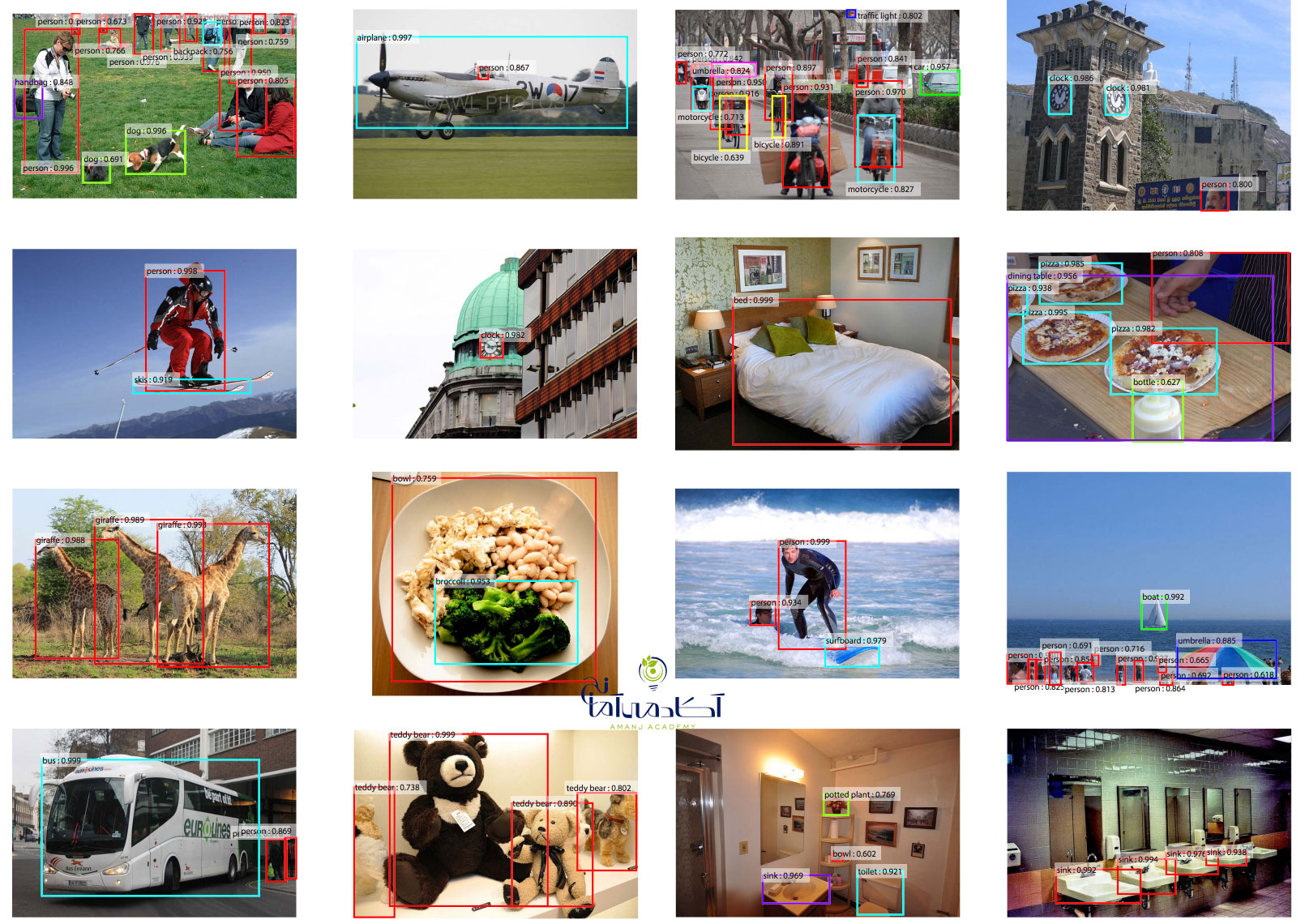 شکل ج: نمونه ای از شناسایی شی در بانک اطلاعات MS COCO
شکل ج: نمونه ای از شناسایی شی در بانک اطلاعات MS COCO
4. انتقال سبک ( Style Transfer)
انتقال سبک یا انتقال سبک عصبی وظیفه برداشت سبک از یک یا چند تصویر و استفاده از آن سبک بر روی یک تصویر جدید است. این وظیفه را می توان به عنوان نوعی فیلتر عکس یا تبدیل تصور کرد که ممکن است ارزیابی عینی نداشته باشد. به عنوان مثال می توان به استفاده از سبک آثار هنری خاص و معروف (مثل آثار پابلو پیکاسو یا وینسنت ون گوگ) برای عکس های جدید اشاره کرد. مجموعه داده ها معمولا شامل آثار هنری معروفی است که در دسترس عموم قرار دارند و همچنین مجموعه داده های بینایی رایانه ای استاندارد.
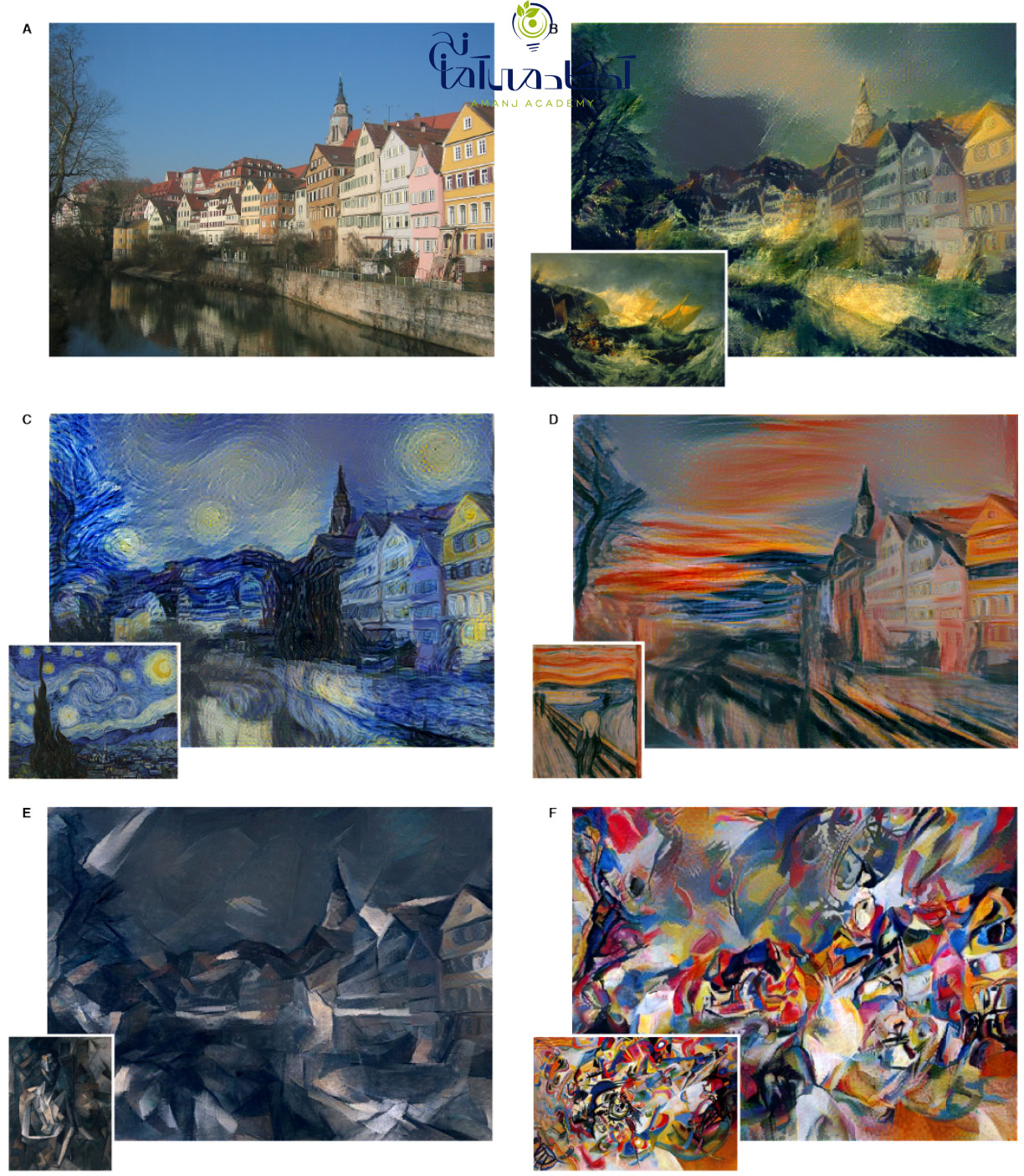 شکل ح: نمونه انتقال سبک عصبی از آثار هنری مشهور به یک عکس. برگرفته از “الگوریتم عصبی از سبک هنری”
شکل ح: نمونه انتقال سبک عصبی از آثار هنری مشهور به یک عکس. برگرفته از “الگوریتم عصبی از سبک هنری”
5. رنگ آمیزی تصویر (Image Colorization)
رنگ آمیزی تصویر یا رنگ آمیزی عصبی شامل تبدیل تصویر با توناژ خاکستری به یک تصویر کاملا رنگی است. این وظیفه را می توان به عنوان نوعی فیلتر عکس یا تبدیل تصور کرد که ممکن است ارزیابی عینی نداشته باشد. نمونه ها شامل رنگ آمیزی عکس ها و فیلم های سیاه و سفید قدیمی است. مجموعه داده ها معمولا شامل استفاده از مجموعه داده های عکس موجود و ایجاد نسخه های خاکستری عکس است که مدل ها باید رنگ آمیزی را یاد بگیرند.
 شکل خ: نمونه هایی از رنگ آمیزی عکس. برگرفته از “رنگ آمیزی تصویر رنگارنگ”
شکل خ: نمونه هایی از رنگ آمیزی عکس. برگرفته از “رنگ آمیزی تصویر رنگارنگ”
6. بازسازی تصویر (Image Reconstruction)
بازسازی تصویر عمل پر کردن قسمت های از دست رفته یک تصویر است. این وظیفه را می توان به عنوان نوعی فیلتر عکس یا تبدیل تصور کرد که ممکن است ارزیابی عینی نداشته باشد. نمونه ها شامل بازسازی عکس ها و فیلم های سیاه و سفید قدیمی آسیب دیده است. . مجموعه داده ها معمولا شامل استفاده از مجموعه داده های عکس موجود و ایجاد نسخه های آسیب دیده عکس است که مدل ها باید بازسازی را یاد بگیرند.
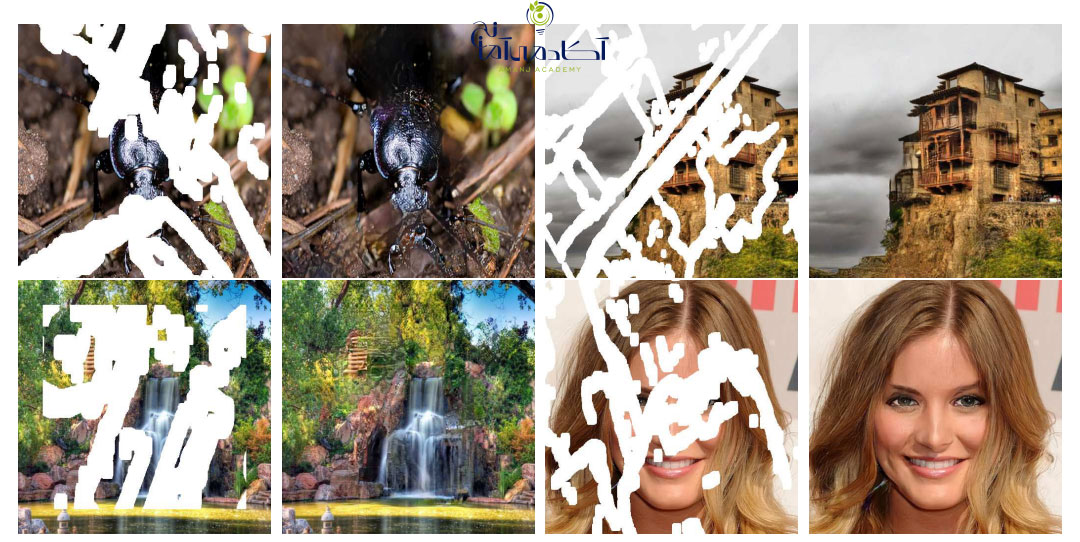 شکل د: برگرفته از “تصویر حاوی سوراخ های نامنظم با استفاده از اتصالات جزئی”
شکل د: برگرفته از “تصویر حاوی سوراخ های نامنظم با استفاده از اتصالات جزئی”
7. تصویر با وضوح فوق العاده (Image Super-Resolution )
تصویر با وضوح فوق العاده وظیفه تولید نسخه جدید یک تصویر با وضوح و جزئیات بالاتر از تصویر اصلی را دارد. داده ها معمولا شامل مجموعه داده های عکس موجود و ایجاد نسخه های کم کیفیت عکس است که مدل ها باید برای ایجاد نسخه های با وضوح فوق العاده آموزش ببینند.
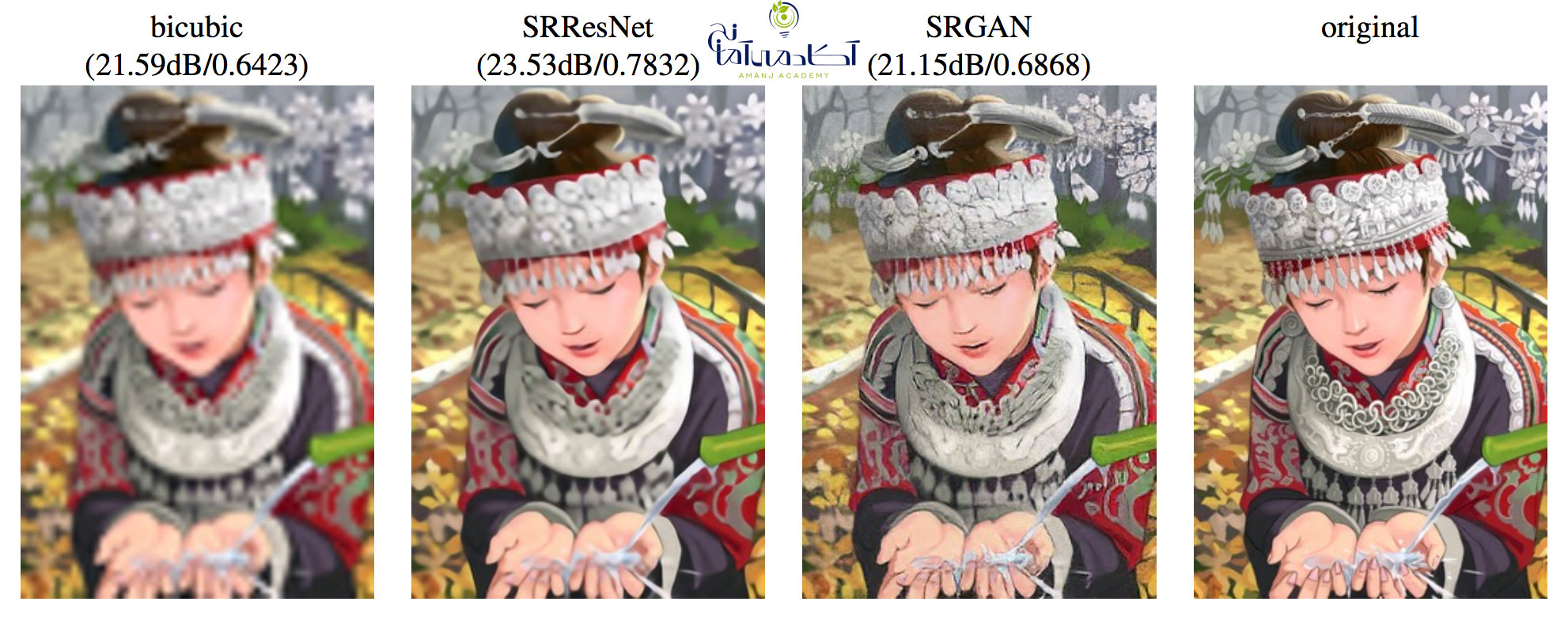 شکل ذ: نمونه ای از نتایج حاصل از تکنیک های مختلف با وضوح فوق العاده
شکل ذ: نمونه ای از نتایج حاصل از تکنیک های مختلف با وضوح فوق العاده
8. سنتز تصویر (Image Synthesis)
سنتز تصویر وظیفه ایجاد تغییرات هدفمند در تصاویر موجود یا تصاویر کاملا جدید را دارد. این یک حوزه بسیار گسترده است که به سرعت در حال پیشرفت می باشد. این ممکن است شامل تغییرات جزئی در تصویر و فیلم باشد، مانند:
• تغییر سبک یک شی در یک صحنه
• اضافه کردن یک شی به صحنه
• اضافه کردن چهره به صحنه
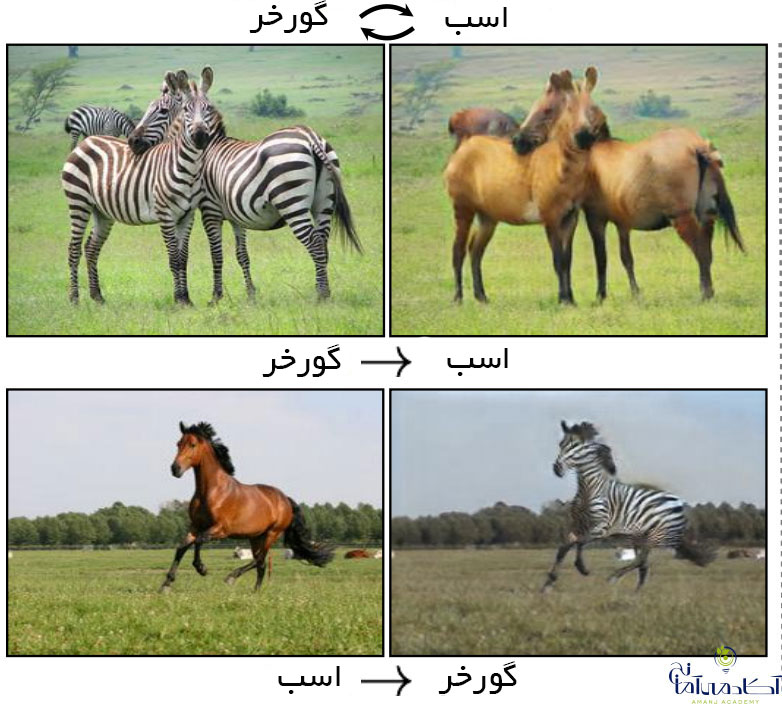
شکل ر: نمونه ای از استایلینگ گورخر و اسب
همچنین ممکن است شامل ایجاد تصاویر کاملا جدید باشد، مانند:
• ایجاد چهره
• ایجاد اتاق
• ایجاد لباس
موارد مهم و جالب دیگری نیز وجود دارد که ما آنها را پوشش ندادیم زیرا آنها صرفا مربوط به بینایی رایانه ای نیستند.
نمونه هایی از تبدیل تصویر به متن و متن به تصویر:
نوشتن شرح تصاویر: تولید توضیحی متنی از یک تصویر.
توصیف تصویر: تولید توضیحی متنی از هر شی در یک تصویر.
متن به تصویر: تلفیق تصویر بر اساس توضیحات متنی.



